Grab Sample Technologies
Acoustics can provide very accurate representations of the seafloor landscape – both the topography via high-resolution depth data and the nature of the seafloor via the backscatter signal strength. There are, however, a number of factors that can confound these measurements that mandate that actual physical samples of the seafloor be collected for detailed analyses of the sediment grain size. These samples can also be analyzed for a range of compounds from nutrients to heavy metal contaminants. Furthermore, despite the advances in high definition imaging, a picture alone cannot provide information on the rich biodiversity that lives in the sediments of the Sound. There are several sampling devices that have been employed by the Long Island Sound Habitat Mapping teams to provide the fine scale data required to augment the acoustic and imaging systems.
Infaunal Grab Sampler – SEABOSS
The US Geological Survey’s SEABed Observation and Sampling System (SEABOSS) was one of the primary tools used to sample the sediments for infaunal taxa in the Sound. SEABOSS has a Van Veen grab mounted in its frame that takes a sample of the seafloor by quickly lowering it to the seafloor to close the clamshell doors of the sampler. The operator is able to view the seafloor with realtime cameras to determine exactly where to take the grab. Upon recovery, the grab sampler is opened, the surface sediments photographed and a sub-sample taken for grain size analyses. The remainder of the grab is collected in a tote and filtered through metal sieves to collect the organisms living in those sediments. The organisms are then stained and fixed in alcohol for subsequent analysis for taxonomic identification back in the lab, typically under a microscope.
Infaunal Grab Sampler – PISSAH
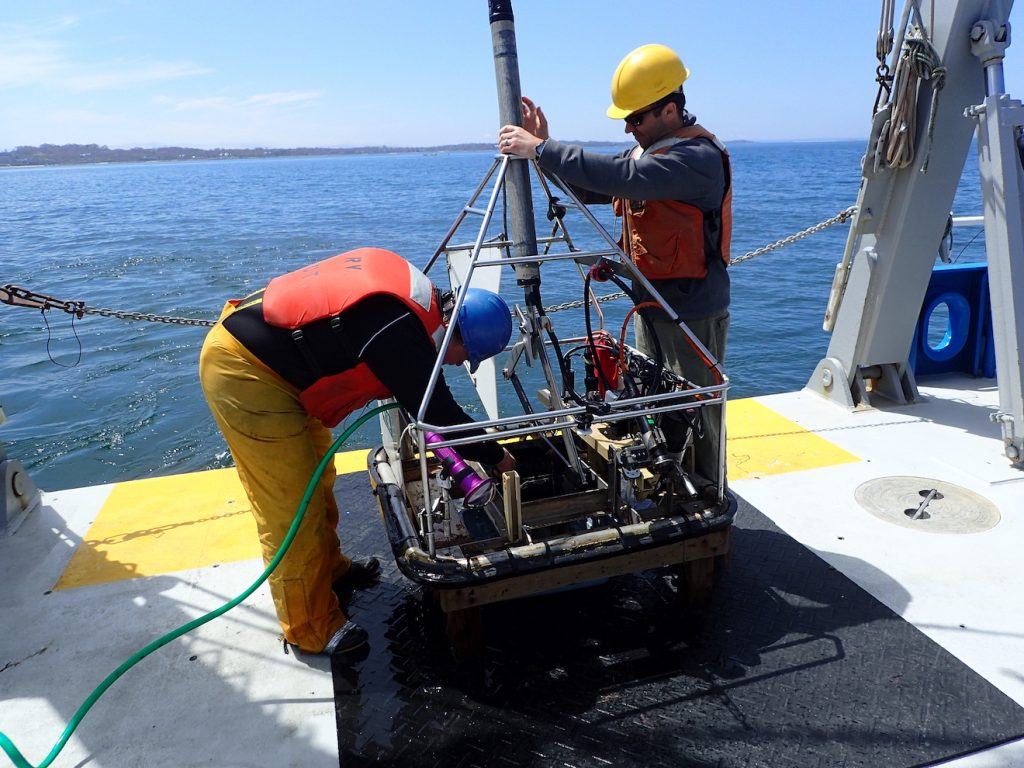
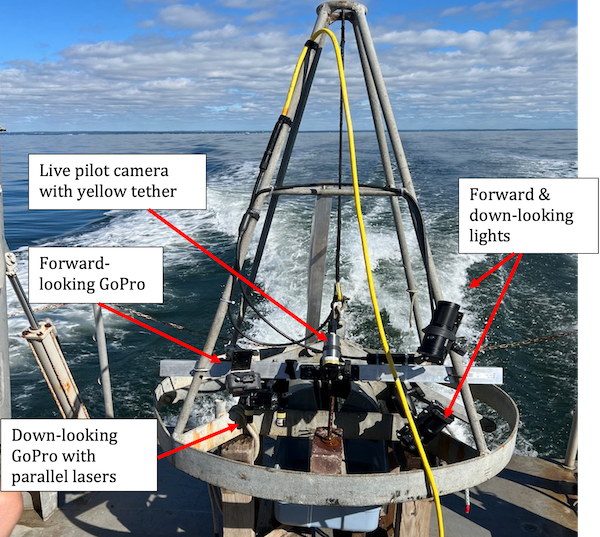
The University of Connecticut developed a simplified version of the SEABOSS, aptly called the Ponar Imaging and Sampling System for Assessing Habitats (PISSSAH). This system was basically a Ponar grab sampler, to which a cabled video camera was attached to provide a realtime view of the seafloor and two 4K GoPro cameras with lights, one looking forward and one looking down. The latter camera had two parallel lasers mounted nearby appearing in the field of view to provide a scaling mechanism. This was a smaller, lighter sampler that could be operated off smaller vessels, such as the RV Lowell Weicker.
Imaging Technologies
Seafloor sampling via grabs and corers is not possible in some regions of Long Island Sound that feature coarse grained sediments, such as gravel, boulders or exposed granite ledge. Although these hard substrate habitats are spatially rare in Long Island Sound, especially in deep waters (>10 m) of the central and western basins they support seafloor communities that contribute uniquely to the rich biological diversity of the Sound. These areas are also preferred habitats for a wide range of species including fish, crustaceans, and molluscs of economic importance. Even in areas dominated by fine-grained sediments, there are some fragile organisms and biogenic structures that form habitats are damaged by physical sampling and therefore better assessed using imagery.
High resolution digital still and high definition video imagery provide the solution to documenting the diversity of the organisms that live on the surface of the hard substrates (i.e. the epifauna) in the Sound. While the two grab samplers described above provided imagery for the majority of sample areas, there are two remotely operated vehicle (ROV) systems that support a range of imaging systems that are being used to characterize the hard substrates and the surface features of softer sediments.
The Boxfish Alpha ROV
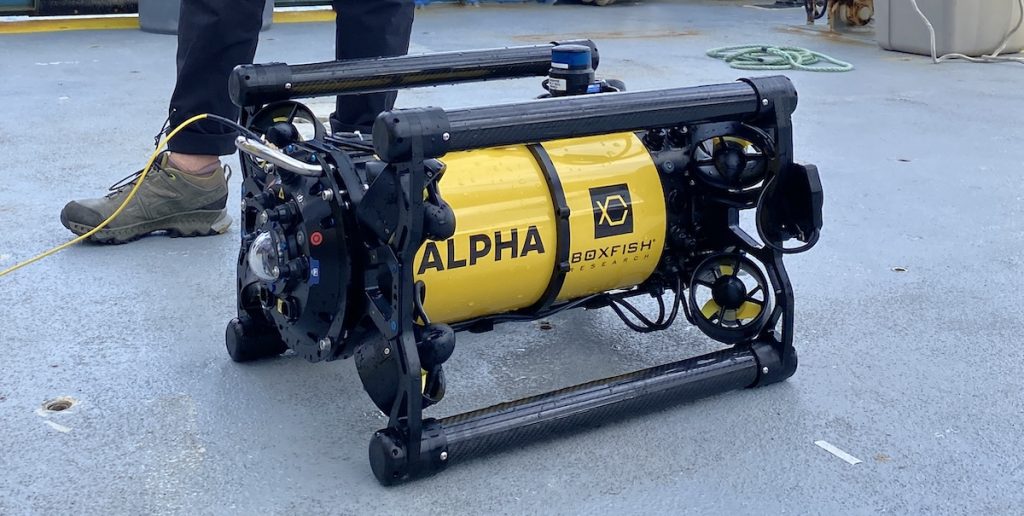
UConn’s Kraken2 remotely operated vehicle (ROV, below) was used in the Phase I and Phase II Cable Funded mapping efforts, but was taken offline in 2018. Support for a new, smaller ROV system was acquired as part of the Phase IVB effort to provide a system capable of characterizing areas that were more challenging to navigate. The Boxfish Alpha ROV is equipped with a 4K video camera and operated via a fiber optic cable. The system records 4K video topside from which high resolution frame captures are taken to provide additional imagery to assess rocky areas. Parallel lasers spaced 10 cm apart provided a size scaling standard for each image.
The Kraken2 ROV
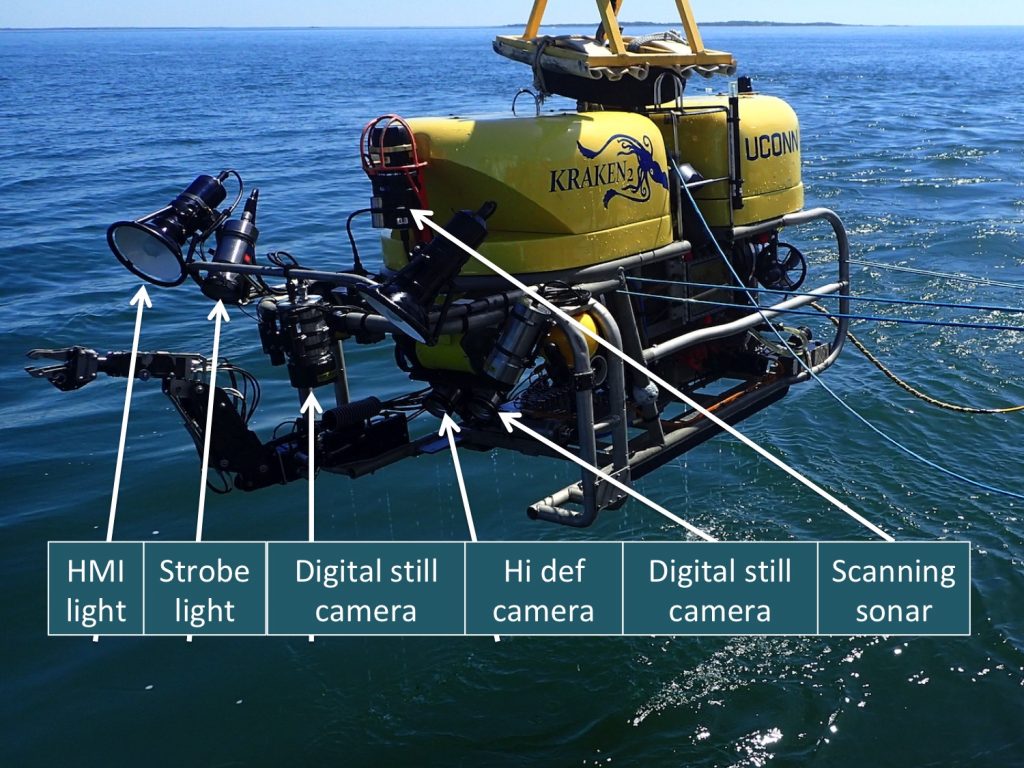
The K2 ROV had six powerful thrusters and was ideally suited to stopping and maneuvering around challenging bottom types. This maneuverability allowed the K2 to image the vertical surfaces of boulder habitats, steep ledge walls and the troughs between sand waves that support mussel dominated communities in great detail with its hi-definition video and high resolution digital still zoom cameras. The K2 similarly supported parallel lasers spaced 10 cm apart to provide precise measurements of the size of organisms and objects seen in both the video and digital still images. All images were taken using artificial lighting (electronic flash or daylight color temperature lighting using HMI or LED sources) to enhance color saturation, edge sharpness, and depth of field.
To learn more about the features and capabilities of the K2 ROV and see videos of the vehicle in action, click here.